
Variable Stiffness Prosthetic Ankle
Motivation
The human ankle is able to alter its biomechanics in response to changing conditions. This ability is a key part of stable locomotion and efficient gait, yet commercial prosthetic ankle-feet generally have fixed mechanical behavior that cannot be altered after manufacture. This lack of adjustment can lead to poorer walking performance in people with amputations. To address this need, we designed a novel ankle prosthesis called the Variable Stiffness Prosthetic Ankle-Foot, or VSPA Foot. The VSPA Foot can change its stiffness in real time, thus continuously providing a stiffness profile which is relevant for the current task.
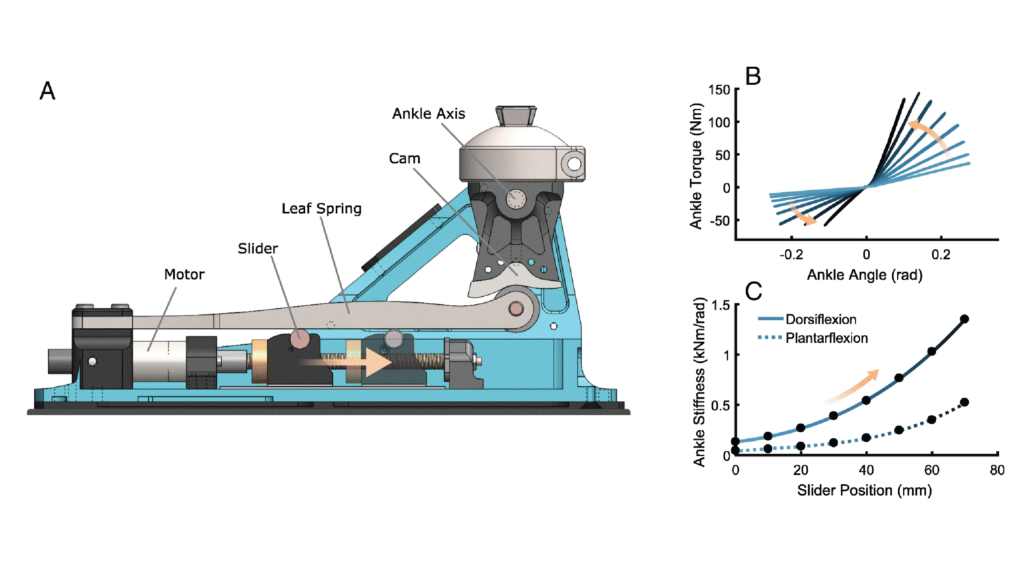
(A) Annotated rendering of the VSPA foot. (B) Moving the slider alters the torque produced by the ankle at a specific angle. (C) As the slider moves towards the cam, the stiffness of the foot increases as indicated by the orange arrows. Figure from Shepherd, M. K., et al. (2018). Amputee perception of prosthetic ankle stiffness during locomotion. Journal of NeuroEngineering and Rehabilitation.
Approach
The VSPA Foot utilizes a cam profile at the ankle joint, which deflects a leaf spring during stance. By altering the shape of the cam profile, we can create a highly customizable torque-angle relationship. The VSPA Foot is able to adjust the stiffness of this torque-angle curve by using a small DC motor and lead screw to change the location of the support under the spring. These functions are contained in a small, anthropomorphic form factor which is vital for widespread, commercial viability of any prosthetic foot. We characterized stiffness profiles of the ankle-foot prosthesis at various support conditions using a custom dynamometer. These results showed that we can render a wide range of stiffnesses appropriate for multiple mobility tasks.
Research
The VSPA Foot is also a valuable research tool that allows us to explore the effects of altering ankle stiffness without having to continuously change and re-align prosthetic feet of different stiffnesses. Our ongoing efforts for this project are focused on prosthetic ankle stiffness perception. We are investigating user-preferred ankle stiffness and the stiffness perception threshold (just-noticeable difference) across various mobility activities, as well as the biomechanical effects of stiffness modulation.

Contributors: Nicholas Pett, Hannah Frame, Max Shepherd, Tyler Clites, Elliott Rouse
Publications
Clites, T. R., Shepherd, M. K., Ingraham, K. A., Wontorcik, L., & Rouse, E. J. (2021). Understanding patient preference in prosthetic ankle stiffness. Journal of NeuroEngineering and Rehabilitation, 18(1), 1-16. https://doi.org/10.1186/s12984-021-00916-1
Shepherd, M. K., and Rouse, E. J. (2020). Comparing preference of ankle–foot stiffness in below-knee amputees and prosthetists. Scientific Reports 10(1), 1-8. doi.org/10.1038/s41598-020-72131-2
Shepherd, M. K., Azocar, A. F., Major M. J., & Rouse E. J. (2018). Amputee perception of prosthetic ankle stiffness during locomotion. Journal of NeuroEngineering and Rehabilitation, 15(1), 99. doi.org/10.1186/s12984-018-0432-5
Shepherd, M. K., Azocar, A. F., Major, M. J., & Rouse, E. J. (2018, August). The Difference Threshold of Ankle-Foot Prosthesis Stiffness for Persons with Transtibial Amputation. In 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob) (pp. 100-104). IEEE. doi.org/10.1109/BIOROB.2018.8488075
Shepherd, M.K., & Rouse, E.J. (2017). The VSPA Foot: A Quasi-Passive Ankle-Foot Prosthesis With Continuously Variable Stiffness. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(12), 2375-2386, doi.org/10.1109/TNSRE.2017.2750113
Shepherd, M. K., & Rouse, E. J. (2017, May). Design of a quasi-passive ankle-foot prosthesis with biomimetic, variable stiffness. In 2017 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6672-6678). IEEE. doi.org/10.1109/ICRA.2017.7989788