
Closed-Loop Torque Control
Motivation
High-fidelity torque control is important for robots, especially for wearable robots (such as the Open Source Leg) that need to react quickly to unexpected dynamics and disturbances. Typical torque-control approaches include feedforward models of current and/or feedback control using torque sensors or series elastic actuators. Feedforward current models work well for fully backdrivable systems, but often still suffer from imperfect models of transmission dynamics. Some promising torque sensors have been developed, but most are either expensive or heavy or both. SEAs enable high fidelity torque sensing along with shock tolerance and compliance, but even highly optimized spring designs can add considerable mass to the system. This is due to the fact that large torques must be reacted at the joint output, and greater deflection increases sensing resolution; thus, a large spring mass is required in order to store the strain energy of the system.
Approach
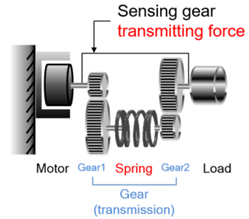
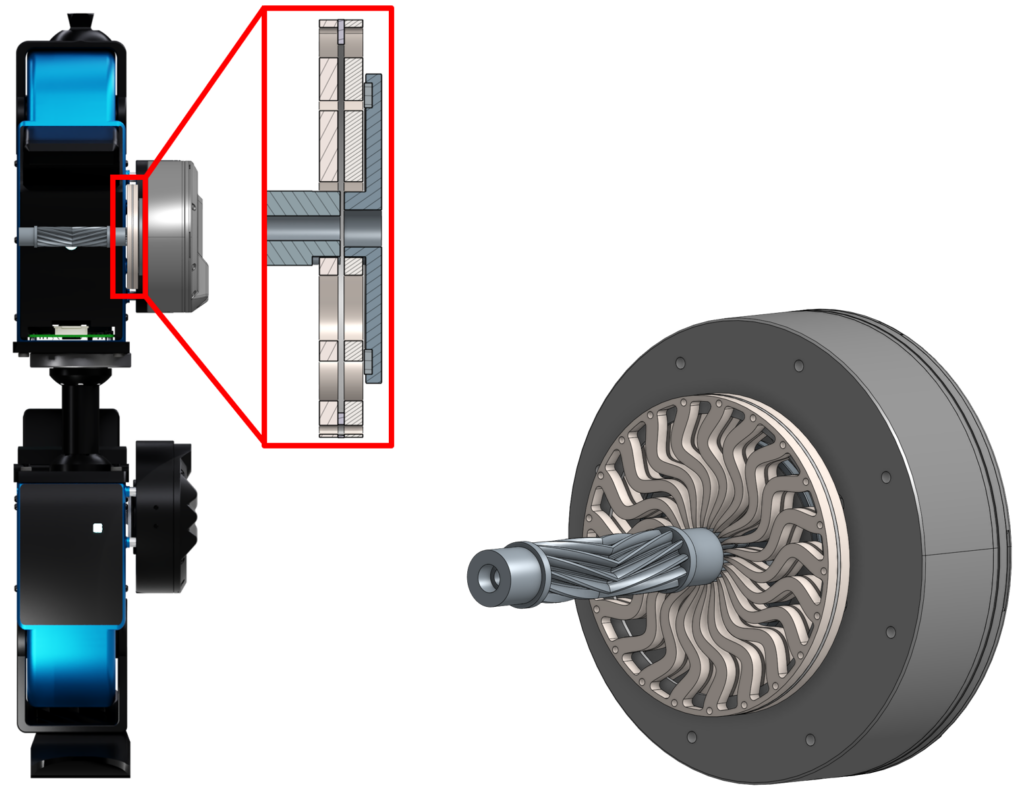
We are exploring an alternative to the standard SEA configuration which allows the spring to operate in a low-torque regime and thus results in low spring mass while maintaining high sensing resolution. The design places the spring at an intermediate stage of the transmission and was originally proposed by Lee et al. in 2017 (Fig. 1). In our case, that the spring is placed between the 9:1 Dephy actuator and the final ~6:1 stage of our transmission (Fig. 2). An encoder can be mounted to the input of the final stage and deflection is measured between that angle and the scaled motor angle. Thus, the spring senses the transmitted torque in a lower torque regime, the springs are much smaller because they don’t need to store nearly as much energy, and lastly, the springs can be placed in series to achieve greater deflection/sensing resolution.
Contributors: Zach Bons, Elliott Rouse