
Compact Spring Design
Motivation
Springs are essential building blocks for many engineering applications, including storing elastic energy and measuring force or torque. This combination of functionality makes springs highly desirable in human-centered robotic applications (e.g., rehabilitation technologies, exoskeletons, and prostheses); however, the added weight and complexity of incorporating springs can result in a difficult trade-off for these mobile systems. To address this problem, we developed a spring design that exploits an efficient loading condition and convenient mates with common transmission components to yield high energy storage per unit mass and volume.
Approach
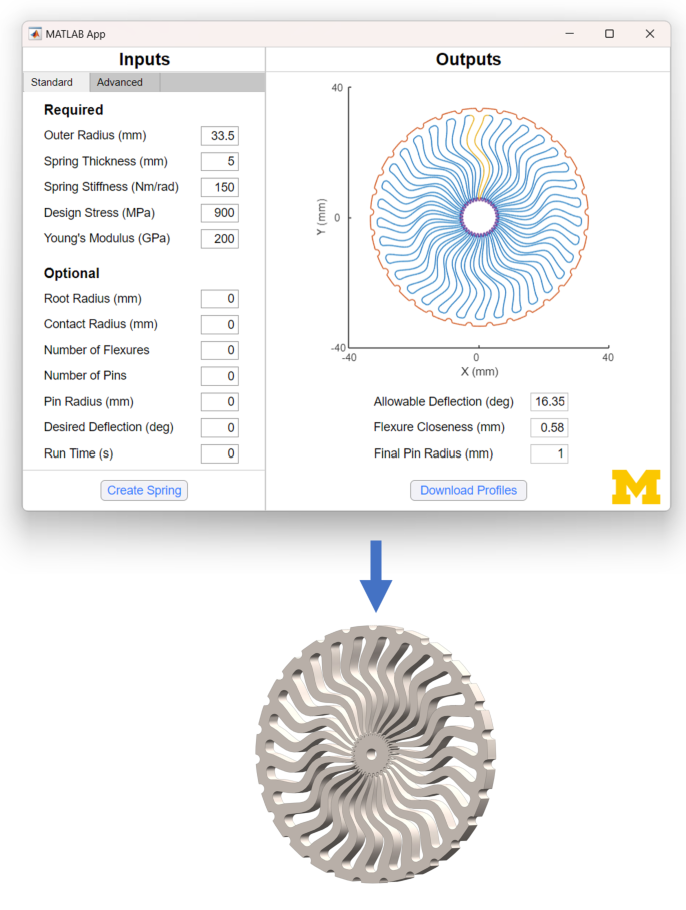
Our spring design comprises a gear-like camshaft in contact with a ring of radial flexure teeth. The teeth protrude inward from a shared outer ring, which is fixed to the spring housing. In operation, the gear-like camshaft rotates relative to the rim ring, imposing a contact force upon the tip of each tooth and causing each of the inward-pointing flexures to bend like a cantilever beam. To maximize energy storage of the spring, we carefully designed the camshaft to achieve a loading condition that approximates ideal bending—the most efficient loading condition for bending beams. To minimize mass, we tapered the flexures to ensure that the entire bending surface is at maximum stress during maximum loading, allowing significant material removal. To minimize the volume, we implement serpentine flexures, which effectively allows for longer beams—and thus greater energy storage—within the same enclosed volume as their straight-flexure counterparts. We designed and tested 4 springs and the measured performance closely matched the desired specifications. Lastly, we developed a Spring Design Tool that automates the design process, reducing a multi-day/week process to a matter of seconds/minutes.
Contributors: Zach Bons, Elliott Rouse