
Inflatable Actuator
Motivation
Exoskeletons, used for performance augmentation and rehabilitation, allow supplemental torque to applied to a joint. Due to the weight of motors, transmissions, and control hardware, current exoskeleton technology is heavy, causing the efficiency of the technology to suffer. But what if power production mechanisms were lighter, and their control scheme was simpler? By using fabric actuators to deliver mechanical work directly to a user’s joints, we can make exoskeletons lighter and more efficient.
Approach
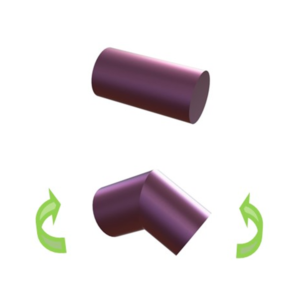
This mechanism directly augments torque about the joint center using a flexible pneumatic actuator. When the pressurized fabric volume is bent about its mid-line, its volume decreases. As it bends and the volume reduces, resistance rises and a restorative torque is produced. The governing equation of this device was derived by equating work in terms of pressure and torque. This closed-form torque expression accounts for the pressure of the inflated volume, the geometry of the cylinder, the angle of bending, and the gas used for pressurization. The controls of this actuator are a simple on/off control system: pressurizing and depressurizing the actuator.
Current work consists of data collection for empirical validation of the derived mathematical model and optimization of design and control parameters when applied at lower limb joints.
Contributors: Chris Nesler, Claire Melvin, Elliott Rouse