
Jumping Exoskeleton
Motivation
Lower-body exoskeletons are primarily designed to ease a walking burden in workplace or military applications. However, there are other taxing workplace tasks where people may also benefit from exoskeletal assistance. To fully assist, exoskeletons will need to assist these less-common activities as well, especially more energy demanding tasks. In a steady-state task like treadmill walking, we can apply a variety of different control strategies to different exoskeletons and successfully achieve reduced loading and metabolic power, but most daily workplace tasks are not easily replicable steady-state tasks. We have designed a custom state machine controller for the Dephy, Inc. ExoBoot to increase vertical jump height. The vertical jump is an energy-demanding, explosive task, but it also is isolated (non-repeating) and easily proportioned into three phases (squatting, take-off, and landing) for control, which makes it an ideal candidate to be one of the first activities approached when pursuing the goal of using exoskeletons in more high-demand tasks.
See a demonstration here:
https://www.youtube.com/watch?v=SfUyfNA0fEE&t=9s
Watch our tech talk and panel discussion:
https://www.youtube.com/watch?v=unSseBx4sWU

Approach
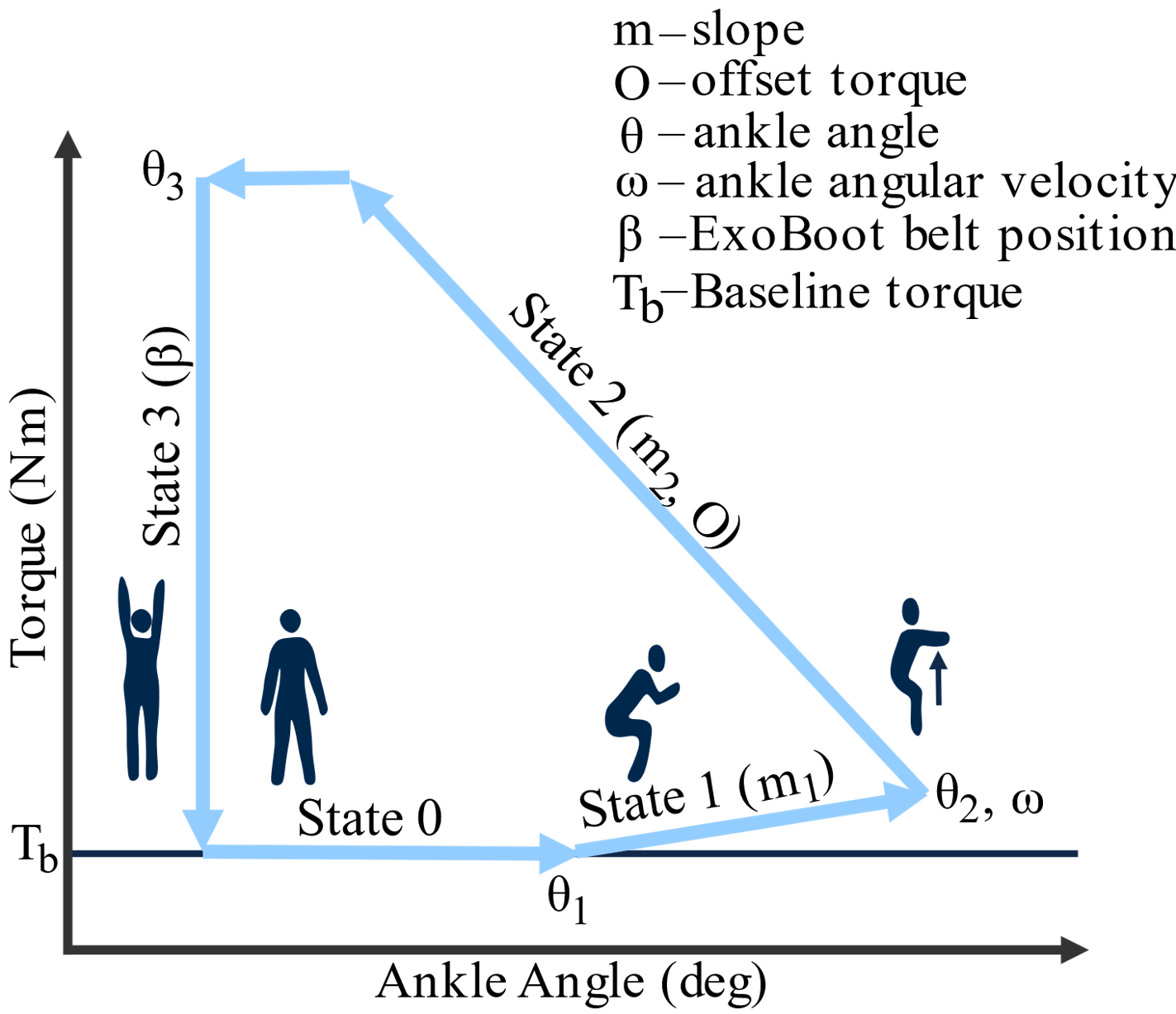
The state machine controller is comprised of four states (right). In state zero, a small bias current is applied to spool up the cables on the ExoBoot. In state one, torque is ramped with ankle angle according to a virtual spring constant in preparation for take-off. In state two, a large, parameterized offset torque is applied to launch the jumper into the air, and in state three, the torque drops back to the bias and the belts unspool to a preset position offset from ankle angle to facilitate a safe landing. The parameters that define the state machine can be tuned for individual users of the jumping exoskeleton.
Contributors: Emily Bywater, Leo Medrano, Elliott Rouse