
Knee Exoskeleton
Motivation
Of the estimated 6.6 million stroke survivors in the United States, almost half report having moderate to severe hemiparesis six months post-stroke. For these individuals, common mobility tasks become difficult or impossible. In particular, transitioning from sitting to standing, which requires large knee torques, takes longer to complete and induces postural instability. People with post-stroke hemiparesis are more likely to fall, and approximately one third of falls occur during transitions such as sit-to-stand. During sit-to-stand transitions, stroke patients heavily favor their non-paretic leg, and show marked joint-level kinetic asymmetries.
Because there is considerable asymmetry in the paretic/non-paretic knee torques, and the knees provide 70% of the work, one strategy to improve sit-to-stand characteristics is to provide knee extension assistance using a powered robotic knee exoskeleton. To perform experiments testing the efficacy of using exoskeletal assistance, we need a device which can appropriately apply assistance. This device must be capable of accurately applying a torque with a low output impedance
Approach
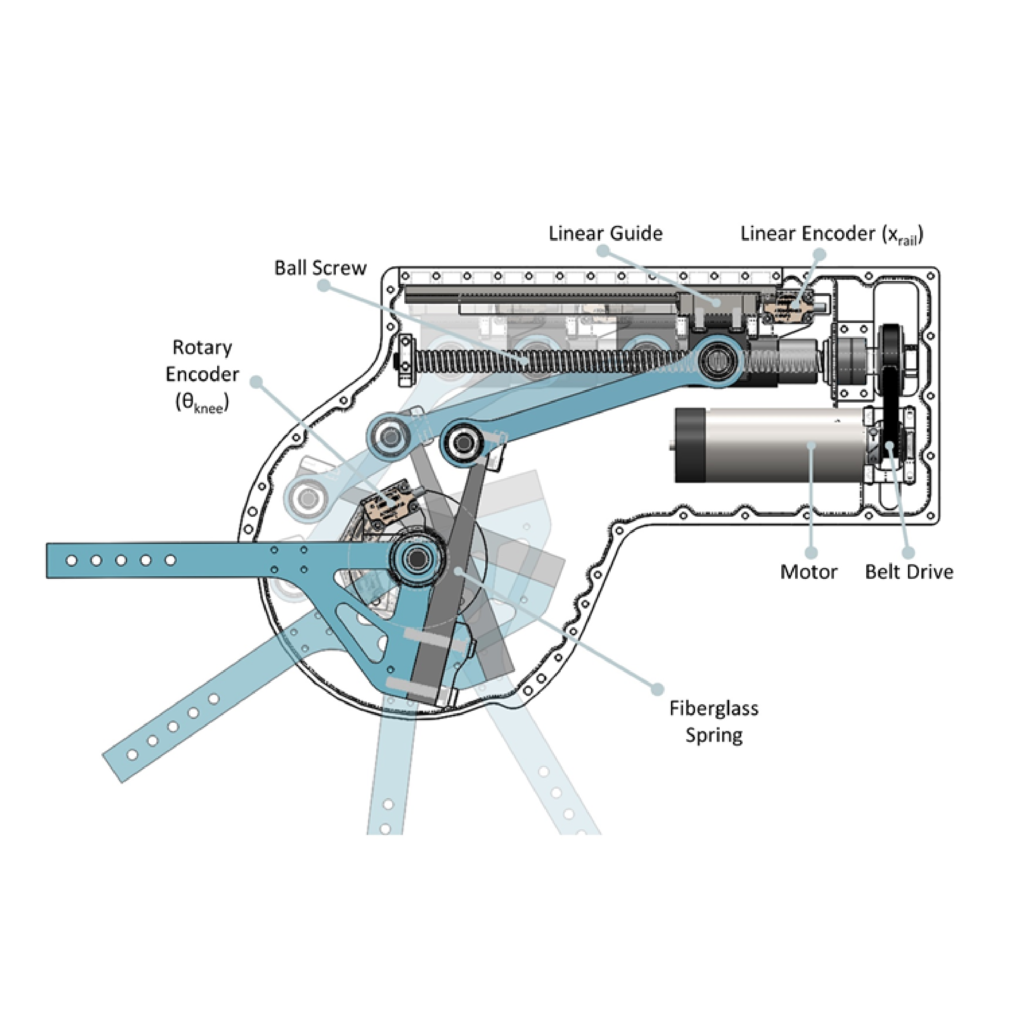
The chosen design utilizes a series-elastic actuator (SEA) configuration to improve force controllability. An SEA uses a spring between the motor and load (here the human) to decouple motor inertia, reduce passive output impedance, and allow modulation of motor position (rather than motor torque) to change the output torque. The result is improved torque control—an important goal of our design.
The primary contribution of this design is the type of spring and the way torque is measured. We use a fiberglass leaf spring—rather than the more common steel coil or torsion springs—because it is able to store significantly (up to 8x) more energy per mass than spring steel, and is easier to mount. Torque is calculated by measuring spring deflection, and using Hooke’s law for springs (F = kx). We measure spring deflection indirectly, by measuring the angular position of the knee and linear position of the linear guide. The spring stiffness (k) also changes as a function of knee angle, and this relationship was empirically determined.
Contributors: Max Shepherd, Elliott Rouse
Publications
Shepherd, M., & Rouse, E.J. (2017). Design and Validation of a Torque-Controllable Knee Exoskeleton for Sit-to-Stand Assistance. IEEE/ASME Transactions on Mechatronics, 22(4), 1695-1704. doi.org/10.1109/TMECH.2017.2704521
Shepherd, M.K., & Rouse, E. J. (2016, August). Design and Characterization of a Torque-Controllable Actuator for Knee Assistance during Sit-to-Stand. In 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (pp. 2228-2231). IEEE. doi.org/10.1109/EMBC.2016.7591172