
Open Source Leg
Want to take a closer look? Visit the Open Source Leg website for more information!



Motivation
Over one million lower-limb amputees live in the United States, most of whom walk at slower speeds and with less efficient gait. Many research groups around the world are striving to eliminates these differences between people with and without amputations. Research groups across the world are investing significant time, money and effort in designing and building specialized, lab-specific robotic prostheses in order to test control strategies. However, the vast differences in mechanical designs between research groups prevents fair comparison and evaluation of control strategies, limiting the impact on amputee quality of life.
We have developed a new robotic leg that provides a robust, inexpensive, modular, and open-source prosthesis to the research community. The Open Source Leg (OSL) offers a common hardware platform for comparison of control strategies, lowers the barrier to entry for prosthesis research, and enables testing within the lab, community, and at home. Utilization of the OSL has the potential to unite the currently fragmented field of prosthetic leg control and facilitate comparison between control strategies. This standardization of hardware may help researchers move closer to achieving the goal of highly functional robotic prosthetic legs.
Approach
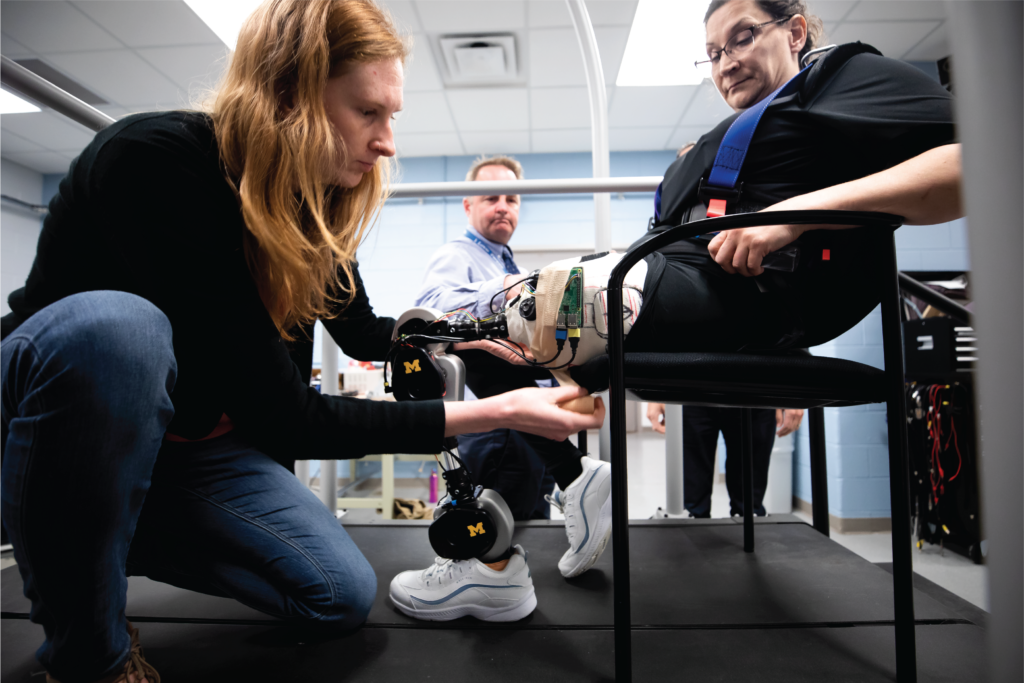
The Open Source Leg features high-torque exterior rotor motors initially developed for the drone industry. The transmission consists of belt drives for high efficiency, low cost, and quiet operation. Additionally, the knee prosthesis gives researchers the option to implement series elasticity and select their desired stiffness level. Moreover, the leg does not require precision-machined components and can be easily assembled or disassembled. Information on how to assemble, control, and use the OSL is open source and can be found here.
OSL v2.0
We have iterated on the OSL design! The new design features a reduced mass, a single stage belt transmission, integrated electronics, and an improved ankle range of motion! Check out the latest design files here.
We have also developed a new software library to interface with our OSL v2 hardware. This library enables research groups to develop and deploy their control methodologies faster than ever before.
Contributors: Senthur Raj Ayyappan, Alejandro Azocar, Kevin Best, Ung Hee Lee, Elliott Rouse
Publications
T. K. Best, G. C. Thomas, S. R. Ayyappan, R. D. Gregg and E. J. Rouse (2024), “A Compensated Open-Loop Impedance Controller Evaluated on the Second-Generation Open-Source Leg Prosthesis,” in IEEE/ASME Transactions on Mechatronics, doi: 10.1109/TMECH.2024.3508469
Azocar, A. F., Mooney, L. M., Duval, J. F., Simon, A. M., Hargrove, L. J., & Rouse, E. J. (2020). Design and clinical implementation of an open-source bionic leg. Nature Biomedical Engineering 4, 1-13. doi.org/10.1038/s41551-020-00619-3
Azocar, A. F., Mooney, L. M., Hargrove, L. J., & Rouse, E. J. (2018). Design and Characterization of an Open-Source Robotic Leg Prosthesis. In 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob) (pp. 111-118). IEEE. doi.org/10.1109/BIOROB.2018.8488057